1. По предложенной функциональной схеме описать принцип действия системы, как в режиме статики, так и в режиме динамики (при изменении момента нагрузки). Для данной системы сформулировать задачу регулирования. Оценить, что является возмущающим
- Автоматика и управление
Условие:
1. По предложенной функциональной схеме описать принцип действия системы, как в режиме статики, так и в режиме динамики (при изменении момента нагрузки). Для данной системы сформулировать задачу регулирования. Оценить, что является возмущающим воздействием в заданной системе.
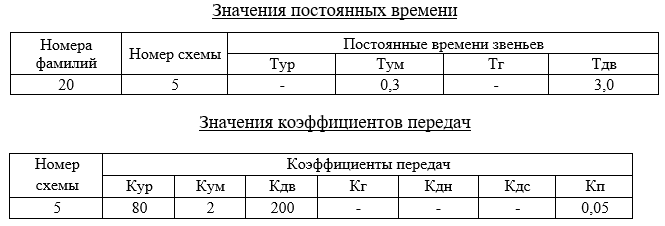
2. Для каждого из звеньев системы составить дифференциальное уравнение во временной и операционной форме. Составить структурную схему каждого из звеньев с заданными числовыми параметрами.
3. Используя результаты п.2 составить структурную схему системы регулирования. Записать передаточную функцию разомкнутой и замкнутой системы. Найти коэффициент усиления разомкнутой системы регулирования.
4. Записать характеристическое уравнение замкнутой системы и оценить устойчивость исходной системы с использованием критерия Гурвица. Найти предельный коэффициент передачи разомкнутого контура. Уменьшить предельный коэффициент на 40% и данную величину применять для дальнейших расчетов. Используя полученный Кр пересчитать заданный коэффициент усиления усилителя рассогласования.
5. Для исходной и модернизированной САР построить годограф разомкнутой системы Wp(jω). Оценить с использованием критерий Найквиста устойчивость как исходной, так и вновь полученной системы.
6. Рассчитать точную и асимптотическую логарифмические амплитудно-частотные характеристики ЛАЧХ, для исходной и модернизированной систем. Найти выражение для фазочастотной характеристики системы ФЧХ. Построить графики ЛАЧХ и ЛФЧХ и, используя критерий Найквиста для логарифмических частотных характеристик, оценить устойчивость исходной и полученной систем. По ЛЧХ найти Кр пред. (предельный коэффициент передачи разомкнутой системы) и сравнить его со значением, полученным в пункте 4.
7. Рассчитать значения регулируемой величины и ошибки регулирования при единичном входном воздействии. Построить графики данных величин. Определить установившееся значение этих сигналов.
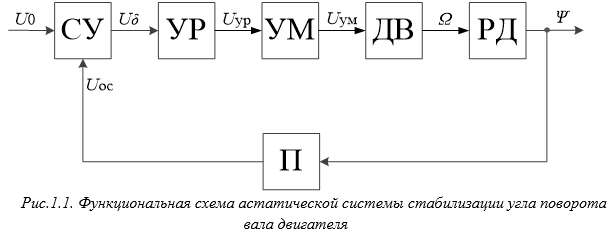
Условные обозначения
СУ – сравнивающее устройство;
УР – усилитель рассогласования;
УМ – усилитель мощности;
ДВ – двигатель;
РД – редуктор;
П – потенциометр;
Решение:
Задание 1
В режиме статики заданию на регулирование U0 будет соответствовать заданный угол поворота вала редуктора (полагаем, что САР устойчива). В соответствие с величиной угла на выходе потенциометра П будем иметь сигнал UОС, который подается на второй вход сравнивающего устройства СУ. Рассматриваемая система является астатической и, следовательно, ошибка регулирования U = U0 UОС = 0. Вследствие равенства нулю сигнала UОС двигатель ДВ не будет вращаться, и значение угла будет оставаться постоянным.
Рассмотрим работу системы в динамическом режиме, то есть при изменении (увеличении) ...
Похожие задачи
Не нашел нужную задачу?
Воспользуйся поиском
AI помощники
Выбери предмет
- Правоохранительные органы
- Пожарная безопасность
- Парикмахерское искусство
- Природообустройство и водопользование
- Почвоведение
- Приборостроение и оптотехника
- Промышленный маркетинг и менеджмент
- Производственный маркетинг и менеджмент
- Процессы и аппараты
- Программирование
- Право и юриспруденция
- Психология
- Политология
- Педагогика
- Трудовое право
- Теория государства и права (ТГП)
- Таможенное право
- Теория игр
- Теория вероятностей
- Теоретическая механика
- Теория управления
- Технология продовольственных продуктов и товаров
- Технологические машины и оборудование
- Теплоэнергетика и теплотехника
- Туризм
- Товароведение
- Таможенное дело
- Торговое дело
- Теория машин и механизмов
- Транспортные средства