
Условие:
1. Представить математическую модель объекта управления, заданную структурной схемой, в векторно-матричной форме. Определить установившееся значение координат состояния объекта при подаче единичных управляющего и возмущающего воздействий.
Вариант структурной схемы:

Вариант параметров объекта управления:

2. Синтезировать алгоритм модального управления заданным объектом при полных измерениях и настройке системы на желаемое распределение корней характеристического полинома, соответствующее биноминальной стандартной линейной форме. Среднегеометрический корень характеристического полинома САУ принять равным:

Определить установившееся значение координат состояния системы модального управления при подаче единичных управляющего и возмущающего воздействий.
3. Синтезировать наблюдатель Люенбергера полного порядка с тем же распределением корней характеристического полинома и среднегеометрическим корнем:

В качестве измеряемой координаты вектора состояния принять х2.
Возмущающее воздействие считать неконтролируемым.
Решение:
1.
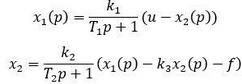
или
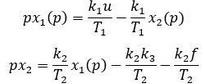
Запишем в дифференциальной форме: