Механическая система состоит из ступенчатых шкивов, колёс блоков 1–5 и грузов 6–9 (рис. 1). На рисунке приняты обозначения: Rk – радиус внешней ступени шкива или радиус тела, rk – радиус внутренней ступени шкива
- Теоретическая механика
Условие:
Механическая система состоит из ступенчатых шкивов, колёс блоков 1–5 и грузов 6–9 (рис. 1). На рисунке приняты обозначения: Rk – радиус внешней ступени шкива или радиус тела, rk – радиус внутренней ступени шкива, pk – радиус инерции тела относительно оси вращения. Для тел 1, 2, 3 заданы радиусы инерции p1, p2, p3 относительно оси вращения, масса тела 4 равномерно распределена по внешнему ободу, тело 5 считать однородным цилиндром. Тела системы соединены друг с другом гибкими невесомыми нерастяжимыми нитями, которые или перекинуты через блоки или намотаны на шкивы, участки нитей параллельны соответствующим плоскостям. Некоторые тела соединены ременными или фрикционными передачами.
В некоторый момент времени под действием силы тяжести система приходит в движение из состояния покоя. При скольжении по плоскостям на грузы действуют силы трения, коэффициент трения скольжения f = 0,1. Качение всех тел происходит без скольжения, при этом для случая качения тел по неподвижным плоскостям следует учитывать трение качения  . Трением в осях вращения пренебречь. Длины нитей и длины участков достаточны для того, чтобы тела при движении не сталкивались друг с другом. Определить скорость груза 6, после того как этот груз переместиться на расстояние s = 10 м. При этом нужно указать, в какую сторону этот груз движется.
. Трением в осях вращения пренебречь. Длины нитей и длины участков достаточны для того, чтобы тела при движении не сталкивались друг с другом. Определить скорость груза 6, после того как этот груз переместиться на расстояние s = 10 м. При этом нужно указать, в какую сторону этот груз движется.
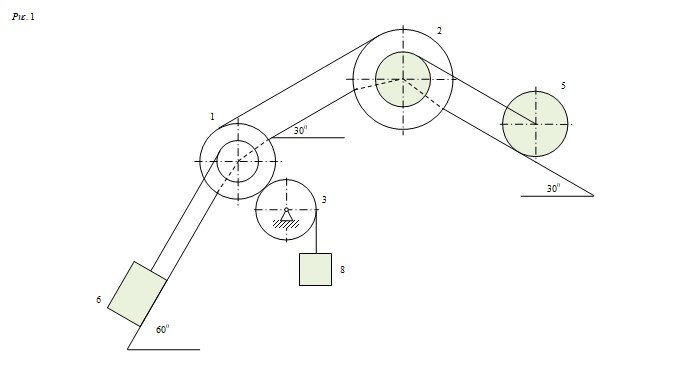
Дано: R1 = 1,2 м; r1 = 0,6 м; p1 = 0,9 м; R2 = 1,8 м; r2 = 1,0 м; p2 = 1,5 м; R3 = 0,8 м; p3 = 0,6 м; R4 = 1,3 м; R5 = 1,1 м; m2 = 150 кг; m5 = 120 кг; m6 = 300 кг; m8 = 90 кг; f = 0,1;  1см = 10–2 м; s = 10 м.
1см = 10–2 м; s = 10 м.
Найти: V6
Решение:
1. Рассмотрим движение механической системы, изображенной на рисунке 1. Для определения искомой скорости V6 воспользуемся теоремой об изменении кинетической энергии

где и кинетическая энергия системы в начальном и конечном положениях, сумма работ внешних сил, приложенных к системе, на перемещении системы из начального положения в конечное, сумма работ внутренних сил на том же перемещении.
Похожие задачи
Не нашел нужную задачу?
Воспользуйся поиском
Выбери предмет
- Правоохранительные органы
- Пожарная безопасность
- Парикмахерское искусство
- Природообустройство и водопользование
- Почвоведение
- Приборостроение и оптотехника
- Промышленный маркетинг и менеджмент
- Производственный маркетинг и менеджмент
- Процессы и аппараты
- Программирование
- Право и юриспруденция
- Психология
- Политология
- Педагогика
- Трудовое право
- Теория государства и права (ТГП)
- Таможенное право
- Теория игр
- Текстильная промышленность
- Теория вероятностей
- Теоретическая механика
- Теория управления
- Технология продовольственных продуктов и товаров
- Технологические машины и оборудование
- Теплоэнергетика и теплотехника
- Туризм
- Товароведение
- Таможенное дело
- Торговое дело
- Теория машин и механизмов
- Транспортные средства