Условие:
Цель работы: цель заключается в изучении моделей и характеристик основных типовых динамических звеньев систем управления.
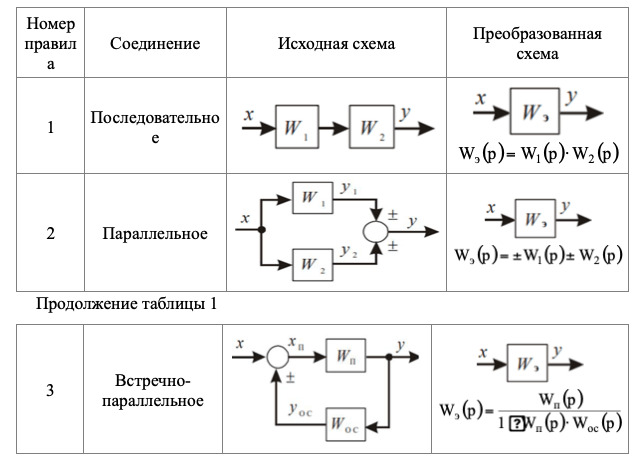
В соответствии с заданным вариантом необходимо преобразовать исходную многоконтурную систему в одноконтурную с целью получения передаточных функций разомкнутого контура
системы  и замкнутой системы
и замкнутой системы  по заданным каналам воздействий.
по заданным каналам воздействий.
Передаточные функции разомкнутой и замкнутой систем следует записать через эквивалентные передаточные функции звеньев, не раскрывая последние.
Исходная алгоритмическая схема системы изображена на рисунке 1

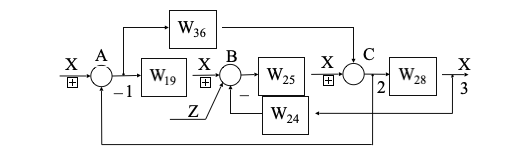
Рисунок 1 – Исходная алгоритмическая схема