
Условие:
Дана модель системы автоматического управления.
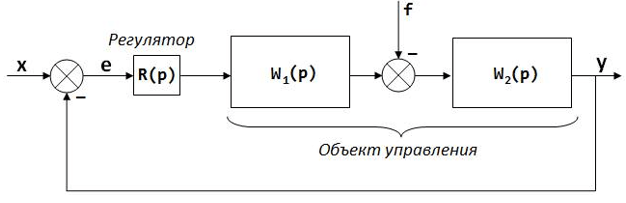
Величины системы: x – задающее воздействие, y – регулируемая величина, f – возмущающее воздействие, e – ошибка.
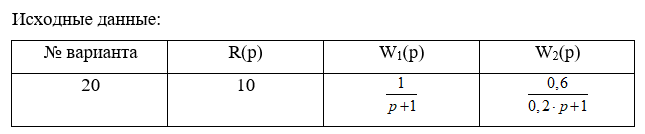
Передаточные функции: R(p) – передаточная функция регулятора, W1(p) – передаточная функция первого звена объекта управления, W2(p) – передаточная функция второго звена объекта управления.
Рассчитать установившиеся ошибки при типовых возмущающих воздействиях: постоянное единичное и линейно-нарастающее с единичной скоростью. Определить порядок астатизма по возмущающему воздействию. Построить модель системы в Simulink с тем типовым возмущающим воздействием, порядок которого равен порядку астатизма по возмущающему воздействию. Задающее воздействие задать равным нулю. Значение ошибки вывести на блок Display. После завершения симуляции на блоке Display должна отобразиться установившаяся ошибка (такая же, как по расчёту). В отчёте по работе должны быть процессы f(t), y(t) на одной плоскости. Показать значение установившейся ошибки на графиках.
Решение:
ПФ замкнутой системы по ошибке возмущающего воздействия F:

Установившаяся ошибка может быть определена по формуле:
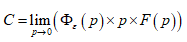
В этой формуле:
Ф(р) ПФ системы по ошибке соответствующего воздействия
p оператор Лапла...