
Условие:
Дана модель системы автоматического управления.
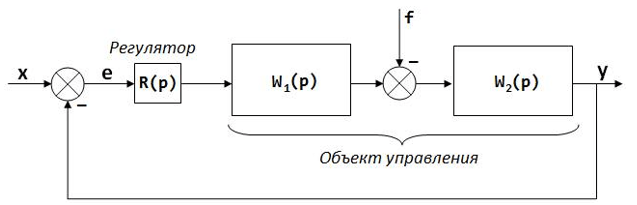
Величины системы: x – задающее воздействие, y – регулируемая величина, f – возмущающее воздействие, e – ошибка.
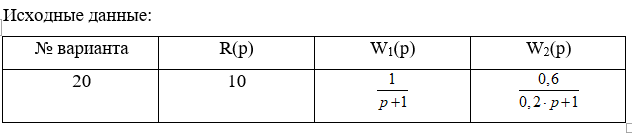
Передаточные функции: R(p) – передаточная функция регулятора, W1(p) – передаточная функция первого звена объекта управления, W2(p) – передаточная функция второго звена объекта управления.
Изменить передаточную функцию регулятора, исходя из новых требований к системе. Построить модель новой системы в Simulink. На одну плоскость вывести переходные функции старой и новой систем. При необходимости (если это следует из требований) получить также реакции систем на линейно-нарастающее задание. Подтвердить по результатам симуляции, что требования к новой системе выполняются.
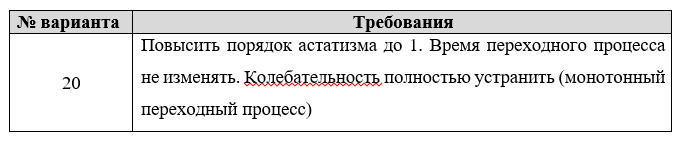
Требования к новой системе для задания № 4
Решение:
Определим регулятора, при котором система будет обладать 1 порядком астатизма и иметь монотонный характер переходного процесса, но при неизменном времени регулирования.
Выберем в качестве звена КУ звено вида
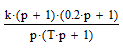
Запишем ПФ замкнутой системы без учёта коэффициента передачи и постоянной времени регулятора: