
Условие:
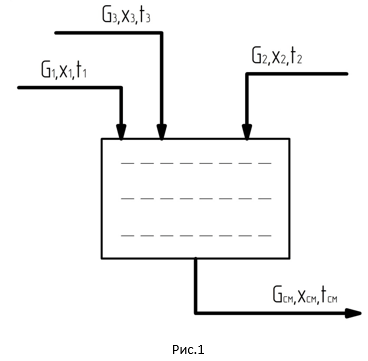
Объект управления – ёмкостной смеситель (рис.1). Выходные (регулируемые) координаты объекта управления – температура смеси tсм и концентрация смеси на выходе из аппарата. На объект управления действует ряд возмущений. Наиболее сильные возмущения, при действии которых замкнутые одноконтурные АСР выходных координат объекта управления не обеспечивают заданное качество регулирования, и требуется применять АСР усложненной структуры – изменения х3 и перепад давления в линиях подачи продуктов с расходами G2 и G3 .
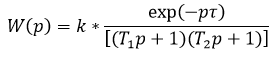
Динамика основных каналов объекта управления приближенно описывается передаточными функциями апериодического звена второго порядка.
Коэффициенты передаточных функций каналов объекта управления приведены в таблице.

Выполнить:
1. Выбрать регулирующие воздействия для каждой из выходных координат объекта управления, изобразить структурную схему объекта и рассчитать коэффициенты связанности на «нулевой частоте».
2. Построить структурную схему автоматической системы связанного регулирования с односторонней внешней связью.
3. Выбрать необходимые технические средства и разработать упрощенную принципиальную схему автоматической системы связанного регулирования, соответствующую принятой структурной схеме.
4. Выбрать типы регулирующих органов.
5. Определить «знаки передаточных функций регуляторов», с которыми АСР будет нормально функционировать.
6. Описать работу разработанной АСР при действии возмущений различных групп.
Определить передаточные функции идеальных компенсаторов и сделать вывод об их физической реализуемости. Регулирующие органы считать апериодическими звеньями первого порядка:
