
Условие:
Объект управления – бак с водой.
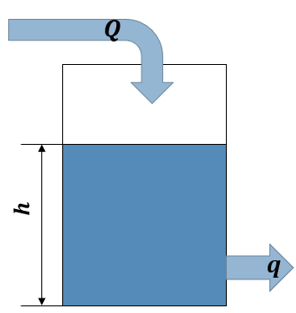
Описание объекта. В бак поступает вода (Q). Подача воды в бак регулируется насосом. Из бака вода (q) постоянно поступает для различных задач. Необходимо постоянно поддерживать заданный уровень (h) в баке.
h (м)- уровень воды в баке, регулируемая величина;
![]() – поток воды, поступающей в бак, сигнал управления;
– поток воды, поступающей в бак, сигнал управления;
 – поток воды, вытекающей из бака.
– поток воды, вытекающей из бака.
Модель объекта описывается следующим ДУ: 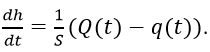
При построении системы управления принят ПФ обратной связи равной  где
где
h, q и k – определяются вариантом задания и приведены в таблице ниже.
1. Построить систему управления с использованием ПИ и ПИД регулятора, который бы обеспечивал  . Получить для системы с каждым видом регулятора переходную характеристику и частотные характеристики. Сравнить полученные результаты и сделать выводы.
. Получить для системы с каждым видом регулятора переходную характеристику и частотные характеристики. Сравнить полученные результаты и сделать выводы.
2. Определить параметры ПИД-регулятора при наименьшем перерегулировании в системе. При полученных параметрах определить запасы устойчивости по амплитуде и фазе, степень устойчивости и колебательности. Сделать выводы.
3. Определить параметры ПИД-регулятора при наименьшем времени регулирования в системе. При полученных параметрах определить запасы устойчивости по амплитуде и фазе, степень устойчивости и колебательности. Сделать выводы.
Исходные данные приведены в таблице 1.

Решение:
1. Построим систему управления с использованием ПИ и ПИД регулятора, который бы обеспечивал
На основании заданного ДУ составим Simulink-модель системы:

Используя ПИ-регулятор с передаточной функцией: