
Условие:
Структура системы управления положением электродвигателя приведена на рис.2.1.
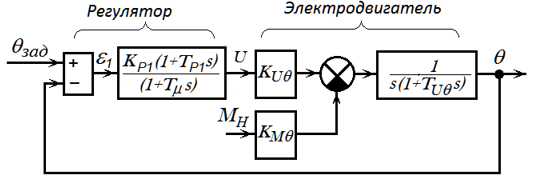
Рисунок 2.1 – Структура системы управления положением электродвигателя

Порядок выполнения задания
1. Выполнить синтез регулятора положения по частотным характеристикам (ЛАЧХ и ЛФЧХ) разомкнутой системы, используя m–кривую для заданного перерегулирования.
2. Построить переходную характеристику замкнутой системы при отработке заданного перемещения, определить перерегулирование и сравнить его с заданным значением.
3. Для рассчитанного коэффициента регулятора построить переходную характеристику замкнутой системы по возмущению при заданном моменте нагрузки МН. Сделать выводы о влиянии момента нагрузки на ошибку отработки перемещения.
Решение:
1. Синтез регулятора положения по частотным характеристикам
Заданному значению перерегулирования =20% соответствует показатель колебательности М=1,231
Подбираем -кривую, изменяя коэффициент усиления Кр1 регулятора, как показано на рис.2.2.
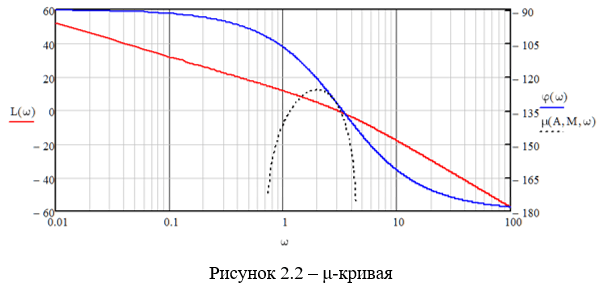
-кривая на рис.2.2 соответствует коэффициенту Кр1=2,1 .
Таким образом, пе...