
Условие:
1. Для полученного варианта объекта управления, заданного матрицами А, В, С (см. табл.1), обосновать возможность модального управления с помощью критерия управляемости.
2. Рассчитать коэффициенты обратной связи, при которой обеспечивается желаемое расположение полюсов замкнутой системы. Рассмотреть два варианта - когда перерегулирование равно 30% и 0% (апериодический процесс).
3. С помощью выбора масштабирующих коэффициентов обеспечить в системах нулевую установившуюся ошибку.
4. Собрать в пакете Matlab/Simulink структурную схему системы с модальным регулятором (не используя блок State space) и проверить полученные результаты.
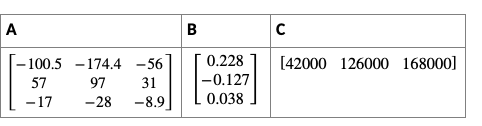
Исходные данные
Решение:
Обоснование возможности модального управления с помощью критерия управляемости.
Составим матрицу управляемости и найдём её определитель с помощью следующей программы в matlab:
A = [-100.5 -174.4 -56; 57 97 31; -17 -28 -8.9]
B = [0.228; -0.127; 0.038]
MU = ctrb(A,B)
det(MU)
Таким образом, определитель матрицы управляемости отличен от нуля, следовательно система управляема.
Расчет коэффициентов обратно...