Автоматическое управление промышленным манипулятором. Манипулятор предназначен для сборки деталей типа «вал-втулка». Процесс сборки протекает следующим образом
- Автоматизация технологических процессов
Условие:
Автоматическое управление промышленным манипулятором.
Манипулятор предназначен для сборки деталей типа «вал-втулка». Процесс сборки протекает следующим образом: захват втулки из накопителя и установка в сборочное приспособление; захват вала из другого накопителя и сборка с втулкой; захват собранного узла; поворот на 90 градусов и укладка (разгрузка) в тару для готовой продукции. Предусмотреть блокировки наличия деталей в захвате манипулятора. Синтезировать цифровую САУ манипулятором.
Решение:
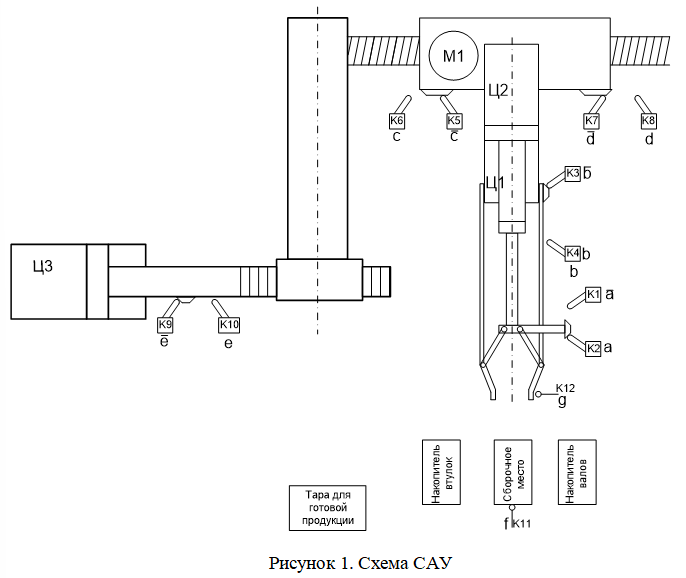
Описание работы САУ.
Исполнительными устройства САУ служат пневматические цилиндры Ц1, Ц2, Ц3 и двигатель М1.
Цилиндр Ц1 при вдвижении штока производит зажим детали посредством захвата, что контролируется конечным выключателем К1, выходной сигнал которого.
Цилиндр Ц2 перемещает захват манипулятора по вертикали для захвата и установки деталуй. Исходное положение штока контролируется конечным выключате...
Похожие задачи
Не нашел нужную задачу?
Воспользуйся поиском
Выбери предмет
- Правоохранительные органы
- Пожарная безопасность
- Парикмахерское искусство
- Природообустройство и водопользование
- Почвоведение
- Приборостроение и оптотехника
- Промышленный маркетинг и менеджмент
- Производственный маркетинг и менеджмент
- Процессы и аппараты
- Программирование
- Право и юриспруденция
- Психология
- Политология
- Педагогика
- Трудовое право
- Теория государства и права (ТГП)
- Таможенное право
- Теория игр
- Текстильная промышленность
- Теория вероятностей
- Теоретическая механика
- Теория управления
- Технология продовольственных продуктов и товаров
- Технологические машины и оборудование
- Теплоэнергетика и теплотехника
- Туризм
- Товароведение
- Таможенное дело
- Торговое дело
- Теория машин и механизмов
- Транспортные средства