
Условие:
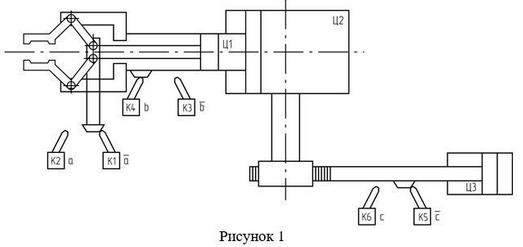
Синтезировать цифровую САУ промышленным манипулятором, который осуществляет загрузку деталей из магазина в станок и их разгрузку в накопитель после обработки. Учесть, что манипулятор имеет две степени подвижности (поворот колонны и перемещение руки) и захватное устройство клещевого типа с пневмоприводом. В САУ предусмотреть блокировку на наличие деталей в магазине и блокировку, фиксирующую завершение обработки детали и остановку станка. Схема компоновки приводов промышленного манипулятора, для которого необходимо синтезировать цифровую САУ, приведена на рисунке 1.
Решение:
Исполнительными устройствами манипулятора служат пневматические цилиндры (Ц1, Ц2, Ц3). Цилиндр Ц1 при вдвижении штока производит зажим детали посредством захвата, что контролируется конечным выключателем К1, выходной сигнал которого . Разжим захвата контролируется К2 - сигнал . Цилиндр Ц2 перемещает руку манипулятора. Исходное положение его штока контролируется К3 с выходным сигналом , конечное, выдвинутое - К4 с выходным сигналом . Цилиндр Ц3 при выдвижении штока посредством реечно-зубчатой передачи осуществляет поворот руки к станку, что контролируется К6 с выходным сигналом и обратный ход ...