Условие:
Лабораторная работа "Моделирование линейной динамики подвижных объектов"
Цельь работы: изучить основные методы исследования линейных моделей, овладеть навыками приведения моделей к разным формам, освоить основные функции языка MATLAB из библиотеки Control System Toolbox.
Объект управления – вертолет, движущийся в вертикальной плоскости. Управление движением осуществляется с помощью наклона плоскости несущего винта на угол  .
.
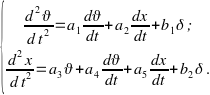
Динамические параметры движения:  – угол тангажа, x – перемещение в горизонтальном направлении. В качестве математической модели процесса стабилизации рассматривается СЛДУ:
– угол тангажа, x – перемещение в горизонтальном направлении. В качестве математической модели процесса стабилизации рассматривается СЛДУ:
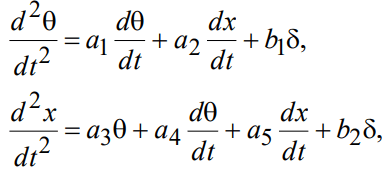
Где a1=-0.415, a2=-0.0111, b1=6.27, a3=9.80, a4=-1.43, a5=-0.0198, b2=9.80. При этом  измеряется в радианах, а x – в метрах.
измеряется в радианах, а x – в метрах.
Задача системы стабилизации – удержать машину в заданном положении при воздействии внешних возмущений.
Содержание работы:
1. Сформировать LTI-объект, соответствующий данной модели. Входом считать переменную  , а выходом – вектор y с компонентами
, а выходом – вектор y с компонентами  и x .
и x .
2. Найти передаточные функции от входа к выходным переменным. Построить диаграммы Боде для этих функций в диапазоне частот ω={0.1…1000}.
3. Определить нули и полюса передаточных функций.
4. Создать frd-объект для частотного анализа модели. Проверить, что объект соответствует созданному в п. 2