
Условие:
Исходные данные:
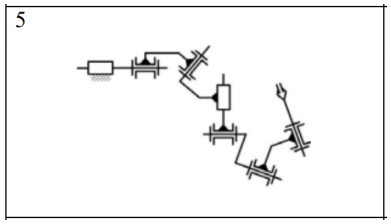
- структурная схема пространственного механизма манипулятора
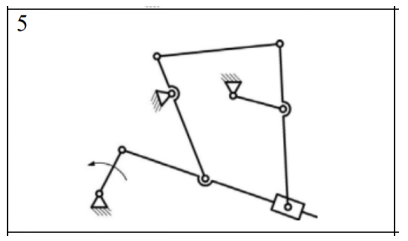
- структурная схема плоского рычажного механизма
Необходимо:
1. Для пространственного механизма манипулятора:
- изобразить структурную схему механизма без соблюдения масштаба, пронумеровать все звенья (стойку обозначить цифрой 0);
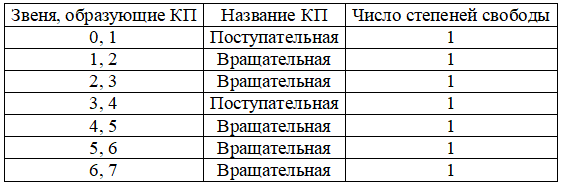
- составить таблицу кинематических пар с указанием номеров звеньев, образующих каждую пару, названия каждой пары и числа степеней свободы;
- найти число степеней свободы механизма по формуле А.П. Малышева.
2. Для плоского рычажного механизма:
- ознакомиться с заданной схемой механизма, выявить стойку, входное, выходное и промежуточные звенья. Изобразить структурную схему механизма без соблюдения масштаба, пронумеровать все звенья (стойку обозначить цифрой 0), обозначить все кинематические пары прописными буквами (О, А, В, С…);
- установить виды движения звеньев относительно стойки (абсолютные) и виды движения относительно друг друга. Составить таблицу кинематических пар с указанием номеров звеньев, образующих каждую пару, названия каждой пары и числом степеней свободы;
- найти число степеней свободы механизма по формуле П.Л. Чебышева;
- выделить начальное звено 1 и стойку 0, изобразив их отдельно;
- оставшуюся кинематическую цепь разложить на структурные группы (группы Ассура), изобразив их отдельно. Указать класс и вид каждой структурной группы.
Решение:
1.1. Пространственный механизм
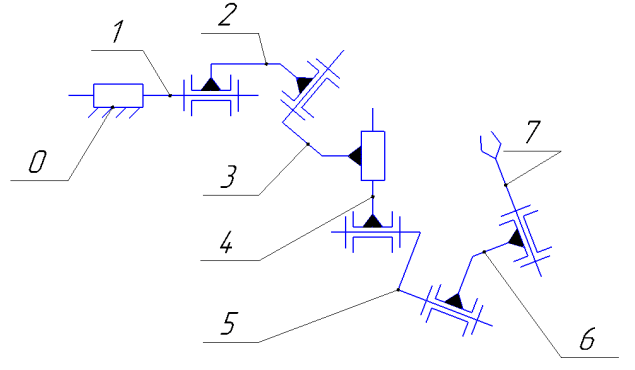
Рисунок 1.1. Схема пространственного механизма
Таблица 1.1. Кинематические пары пространственного механизма
Найдем число степеней свободы меха...