Условие:
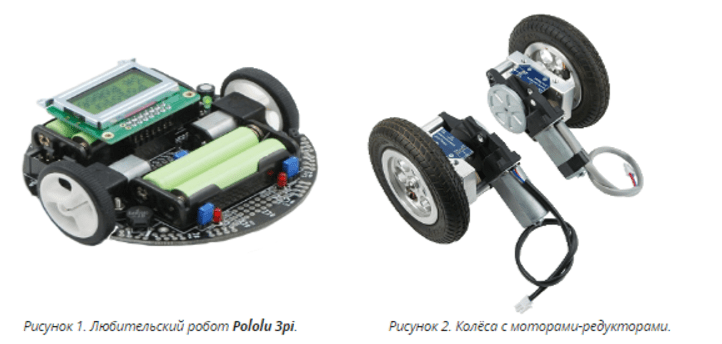
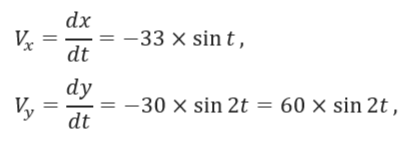
Мобильный робот-тележка (рис. 1) осуществляет криволинейное движение за счет разности угловых скоростей ведущих колес, которые вращаются при помощи моторов-редукторов (рис. 2). Геометрические параметры мобильного робота: радиусы колес r=3 см, расстояние между ними α=9 см. При известном законе движения точки, делящей расстояние между колесами пополам:
x=−33sint см, y=−30sin2t см, 0≤t≤20 с
Найти ее скорость и ускорение в момент времени t=4 c.