
Условие:
Мобильный робот тележка (рис. 1.) осуществляет криволинейное движение за счёт разности угловых скоростей ведущих колёс, которые вращаются при помощи моторов-редукторов (рис. 2).
Геометрические параметры мобильного робота:  расстояние между ними
расстояние между ними 
При известном законе движения точки, делящей расстояние между колёсами пополам:

Найти её скорость и ускорение в момент времени 
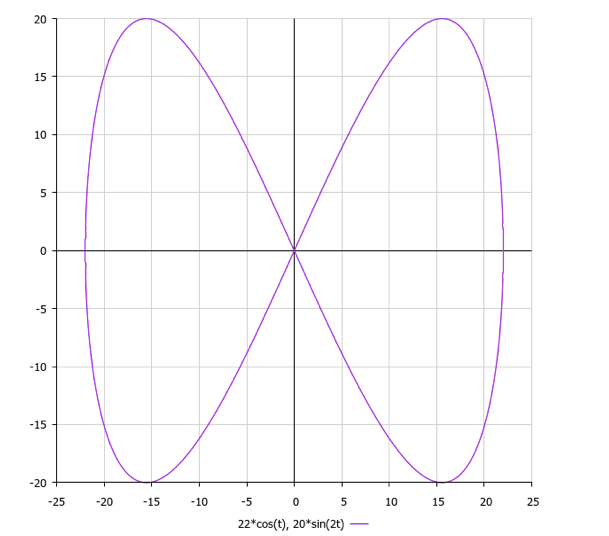
Рекомендуется построить траекторию движения точки с омощью онлайн помощника: http://grafikus.ru/#parametric
Решение:
Этап 1.
В радианах 
График траектории движения мобильного робота-тележки
Начальное положение точка