
Условие:
Для заданной кинематической цепи манипулятора определить количество свобод движения, пространственную (общую) и базовую маневренность, на основании которых сделать выводы о работоспособности предлагаемой схемы и, если это необходимо, предложить способы ее усовершенствования.
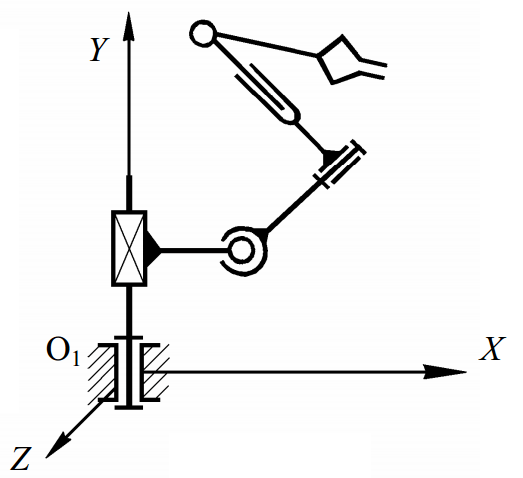
Рисунок 1 – Схема манипулятора
Решение:
Количество степеней подвижности манипулятора Определим по формуле Малышева

где n количество подвижных звеньев пространственной кинематической цепи;
p1, p2, p3, p4, p5 количество кинематических пар пятого, четвертого, третьего, второго, первого классов соответственно.