
Условие:
Определить число степеней свободы и маневренность пространственного механизма манипулятора промышленного робота (рис. 1.3).
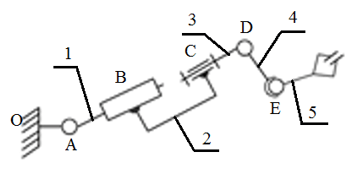
Рисунок 1.3
Решение:
1. Анализ схемы манипулятора
Выходное звено 5 (схват), которое со стойкой 0 не образует кинематических пар, следовательно, схема рассматриваемого механизма является незамкнутой пространственной кинематической цепью. Подвижность (число степеней свободы) определяется по формуле СомоваМалышева для пространственных механизмов:
W = 6n -5p5 - 4p4 - 3p3 - 2p2 - p1, (1), здесь n число подвижных звеньев, кинематческие пары: р5 V класса, р4 IV класса, р3 III класса, р2 II класса и р1 I класса.
Для определения значений коэффициентов p1, p2, p3, p4 и p5 выявим все кинематические пары, вхо...