
Условие:
Определить число степеней свободы и манёвренности механизма манипулятора, представленного нарисунке 1.1.
Определить классы кинематических пар, число степеней свободы и маневренность пространственного механизма манипулятора промышленного робота (рис. 1.1) по заданному варианту схемы. На рисунке указать направление движения звеньев.
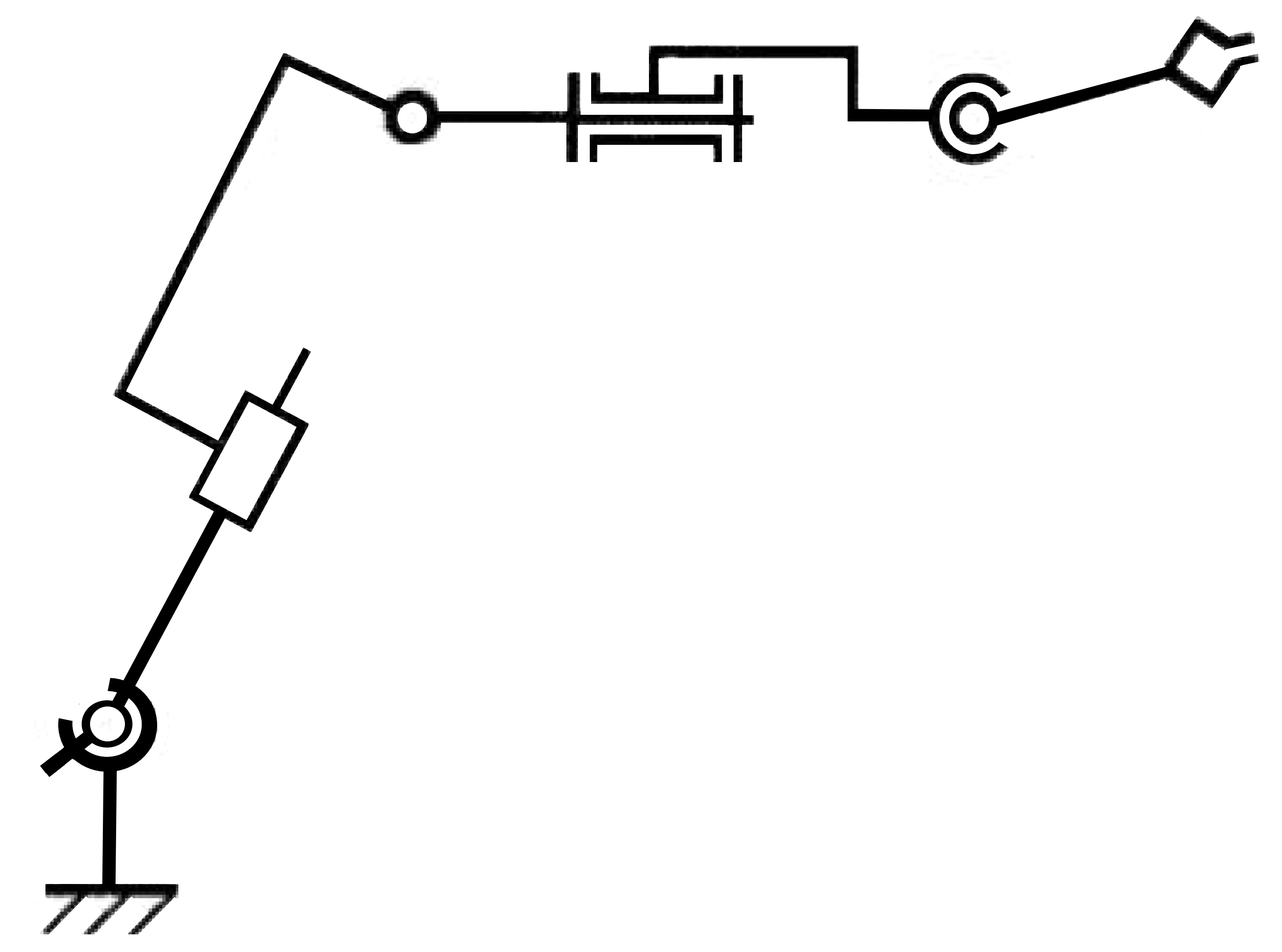
Рисунок 1.1 – Схема механизма манипулятора
Решение:
Проанализируем схему механизма (рисунок 1.2), выходное звено 5 которого со стойкой 0 не образует кинематических пар, следовательно, схема рассматриваемого механизма является незамкнутой кинематической цепью, степень свободы которой определяется по формуле Сомова-Малышева.

Рисунок 1.2 Схема механизма манипулятора
Схема механизма (рисунок 1.2) состоит из одного неподвижного звена - стойки 0 и подвижн...