
Условие:
Определить число степеней свободы и маневренности механизма пространственной манипуляционной системы промышленного робота.
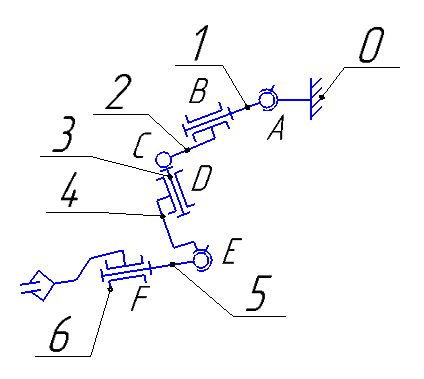
Рисунок 1 – «Рука» копирующего манипулятора
Решение:
Механизм состоит из 7 звеньев, стойка (звено 0) и подвижные звенья (звенья 1, 2, 3, 4, 5, 6), которые образуют 6 кинематических пар.
Данный механизм состоит из таких кинематических пар:
A- пара IV класса со степенью подвижностью 2, движение вращательное вокруг двух осей оси (звенья 0 и 1);
B- пара V класса со степенью подвижности 2, вращательное вокруг одной оси (звенья 1 и 2);
C - пара V класса со степенью ...