Условие:
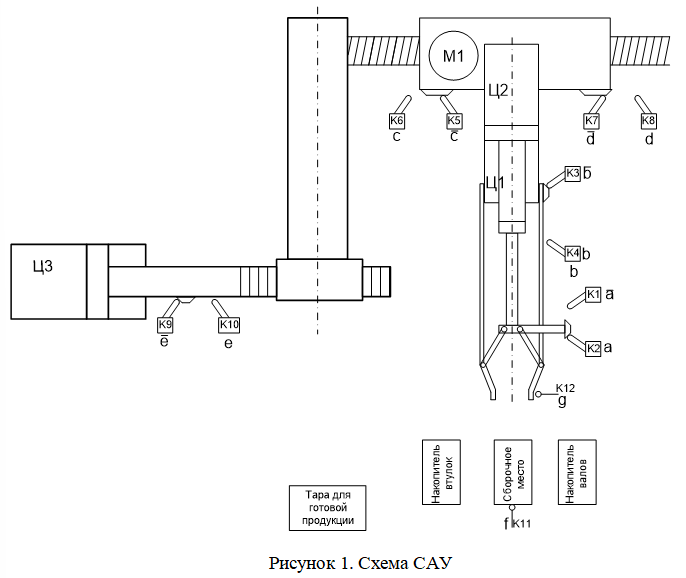
Автоматическое управление промышленным манипулятором.
Манипулятор предназначен для сборки деталей типа «вал-втулка». Процесс сборки протекает следующим образом: захват втулки из накопителя и установка в сборочное приспособление; захват вала из другого накопителя и сборка с втулкой; захват собранного узла; поворот на 90 градусов и укладка (разгрузка) в тару для готовой продукции. Предусмотреть блокировки наличия деталей в захвате манипулятора. Синтезировать цифровую САУ манипулятором.