Условие:
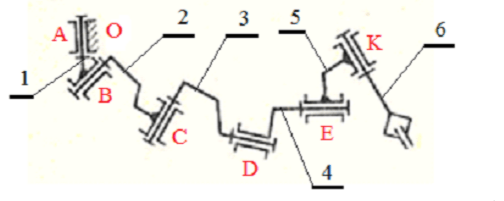
Определить степень свободы пространственной манипуляционной системы промышленного робота. При структурном анализе схемы манипулятора с несколькими степенями свободы указать стойку (неподвижное звено - 0), подвижные звенья, виды кинематических пар, их класс и взаимное расположение.