Условие:
Дана модель системы автоматического управления.
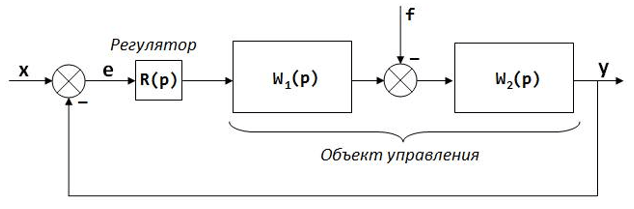
Величины системы: x – задающее воздействие, y – регулируемая величина, f – возмущающее воздействие, e – ошибка.
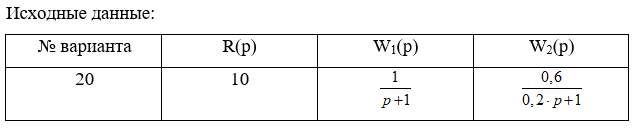
Передаточные функции: R(p) – передаточная функция регулятора, W1(p) – передаточная функция первого звена объекта управления, W2(p) – передаточная функция второго звена объекта управления.
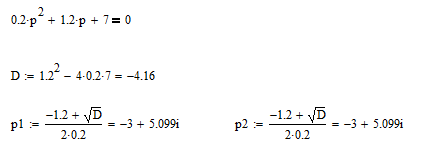
Найти полюсы системы. Убедиться, что система устойчива. Оценить по полюсам время переходного процесса и декремент затухания (если процесс колебательный). Построить модель системы в Simulink, с помощью которой получить переходную функцию системы (реакцию на скачок задающего воздействия). Определить из графика переходной функции время переходного процесса и декремент затухания (если процесс колебательный), показать на графике, как они были найдены. Сравнить расчётные значения этих показателей с теми, которые были найдены по результатам симуляции.