
Условие:
Для пространственного механизма манипулятора промышленного робота (рис. 1, з) определить число степеней свободы и маневренность.
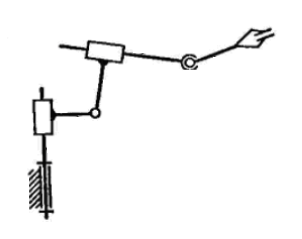
Рисунок 1,з). Структурная схема манипулятора промышленного робота.
Решение:
На исходной схеме арабскими цифрами нумеруем звенья, а заглавными латискими, кинематические пары.

Выходное звено 5 (схват), со стойкой 0 не образует кинематических пар, следовательно, схема рассматриваемого механизма является незамкнутой пространственной кинематической цепью.
Подвижность (число степеней свободы) определяется по формуле СомоваМалышева для пространственных механизмов: